ابداع ربات جراحی که پیچ و مهره هم باز می کند
با الهام از کرم مخملی؛
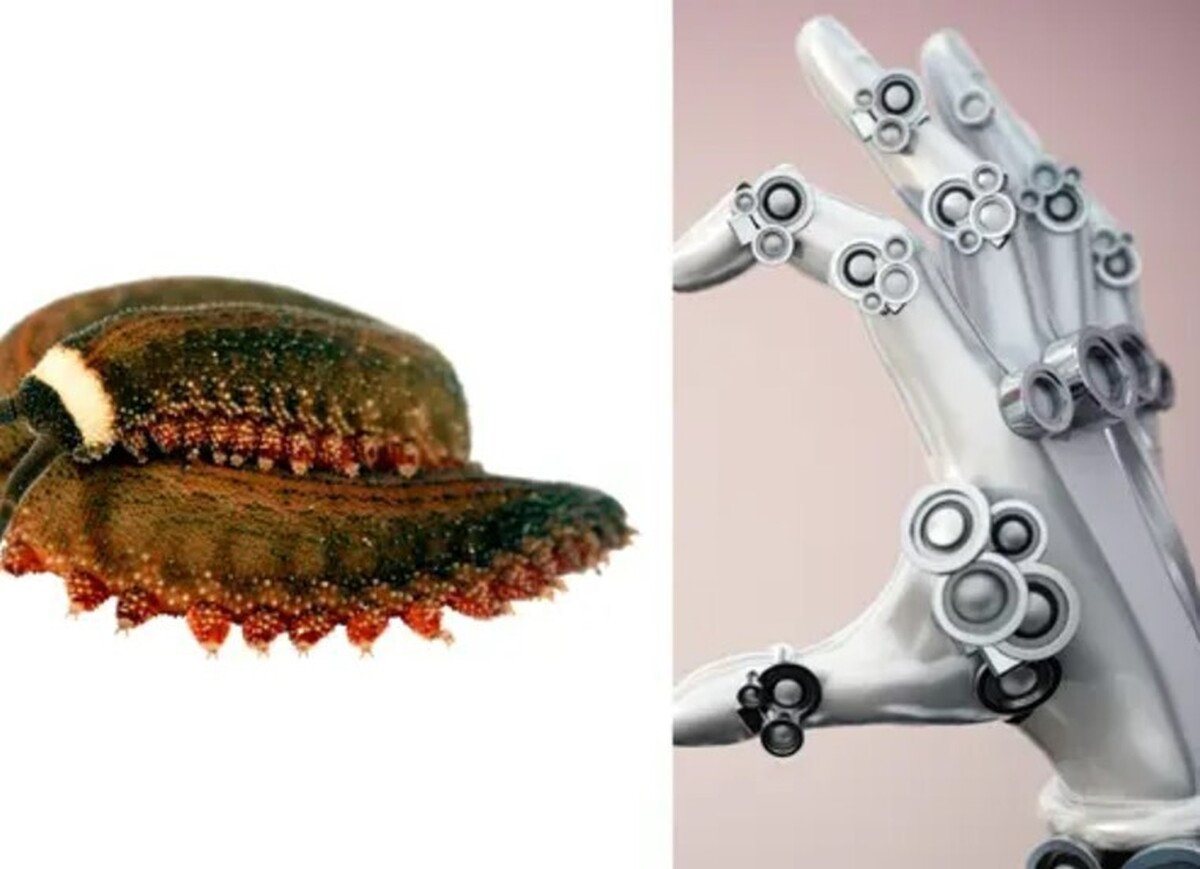
مهندسان با الهام از کرم مخملی نوعی ربات جدید ابداع کرده اند که می تواند با ترشحات چسبناک خود طیفی وسیعی از اجسام را بردارد حمل و دستکاری کند.
به گزارش خبرگزاری آنا به نقل از IE این ربات چسبنده مغناطیسی و بدون اتصال توانسته است تومور را از پای موش بردارد و پتانسیل خود را برای انجام مداخلات جراحی نشان داد. این ربات جدید X شکل که از میکرو و نانوذرات مغناطیسی به نام الاستومر های مغناطیسی ساخته شده است بدون در نظر گرفتن سفتی یا زبری سطح می تواند به اجسام بچسبد.
مهندسان این ربات را با اعمال میدان های مغناطیسی خارجی برای انجام وظایف تنظیم قدرت چسبندگی شکل و روش گرفتنش هدایت می کند. در آزمایش های انجام شده این ربات توانست با موفقیت و پایداری نمونه هایی از بافت خوک را بگیرد.
این ربات همچنین موفق شد یک ماده غذایی نرم و مرطوب به نام توفو تخم مرطوب ماهی سالمون و اندام ها را جابجا کند. حتی در از بین بردن تومور های موش به جراحی کمک کرد. علاوه بر این این ربات یک مهره را از پیچ باز کرد و توانایی خود را در سازگاری با مواد مختلف نشان داد.
دستیابی به کنترل چسبندگی ظریف روی سطوح مختلف هدف همیشه یک چالش اساسی بوده است. توانایی درک ظریف سطوح زیستی و غیرزیستی ناهموار و نرم با پیش بار کم بدون ایجاد آسیب نیز یک نیاز ضروری در ساخت ربات ها تلقی می شده است.
ماده رئومغناطیسی ساختار یافته
سیستم رباتیک چسبناک «هیونگ هو مین» و همکارانش در موسسه مکس پلانک در آلمان از یک ماده رئومغناطیسی ساختار یافته استفاده می کند که کنترل چسبندگی دقیق با ثبات و تکرارپذیر را با تغییر سفتی سریع که توسط یک میدان مغناطیسی خارجی کنترل می شود نشان می دهد.
بر اساس این پژوهش پروتکل چسبندگی پیشنهادی شامل کنترل چسبندگی حالت نرم حفظ سطح تماس وسیع و افزایش مدول کشسان است. این ساختار مکانیکی اثربخشی این پروتکل را افزایش می دهد.
مهندسان تاکید کرده اند ساخت ربات چسبنده قابل کنترل از راه دور که شامل حمل و نقل پایدار اندام های نرم و مرطوب باز کردن مهره از پیچ و پشتیبانی از جراحی برداشتن تومور موش است نشان دهنده کاربرد بالقوه ربات چسبنده نرم در مهندسی پزشکی به ویژه برای هدف قرار دادن بافت ها و موجودات زیستی در مقیاس کوچک است.
«مِتین ستی» یکی دیگر از مجریان این طرح از موسسه هوشمند ماکس پلانک گفت: نتایج نشان می دهد ربات های چسبنده می توانند به عنوان گیره های سلولی برای جراحی در بدن عمل کنند و امکان جراحی از راه دور را برای فضا های داخلی سخت دسترسی که دستگاه های متصل به آنها امکان ورود ندارند فراهم می کند.
ماده پایه ربات نرم یک پلیمر مرکب متشکل از نسبت مناسب (۱:۱.۵) بین ماتریس پلیمر نرم کیت الاستومر سیلیکون و پرکننده های ذرات تشکیل شده است.
مهندسان این ربات را با ریختن پلیمر کامپوزیت پخته نشده در قالب ساخته شده با استفاده از چاپگر سه بعدی و ریخته گری ابداع کرده اند. قالب ربات به شکلی ساخته شد که سلول تومور را به درستی در دست بگیرد. بر اساس این مطالعه این ربات برنامه ریزی شد تا بدن نرم خود را به دور یک ساختار چاپ سه بعدی که از سلول تومور مدل سازی شده بود بپیچاند و آن را در معرض میدان مغناطیسی بزرگ و یکنواخت ۱.۴T قرار دهد.
نتایج این تحقیقات در نشریه Science Advances منتشر شده است.